











Лабораторный практикум с удаленным доступом
Состояние материально-технического оснащения университетов-участников сети «Синергия» в области автоматизации промышленного производства, систем управления, мехатроники и робототехники
Качество обучения по инженерным специальностям в области промышленной автоматизации, систем управления, робототехники, других мехатронных систем во многом определяется степенью использования в учебном процессе современного учебно-лабораторного оборудования и его функциональными возможностями.
В настоящее время мехатронное и робототехническое оборудование, непрерывно совершенствуясь, обновляется ускоренными темпами, что требует от ВУЗов, использующих его в учебном процессе, постоянного проведения сложного комплекса работ по модернизации учебно-лабораторной базы или расходования больших финансовых средств на приобретение нового оборудования. С учетом наблюдающихся тенденций к постоянному удорожанию производимых усовершенствованных устройств и систем новое оборудование становится недоступным для большинства даже продвинутых и крупных технических университетов, которые часто уже не успевают обновлять свою учебно-лабораторную базу в условиях пока еще ограниченных финансовых возможностей нашего государства.
В настоящее время в указанной предметной области участниками сети ведется подготовка бакалавров, магистрантов и аспирантов по следующим направлениям:
- Мехатроника и робототехника.
- Автоматизация технологических процессов и производств.
- Управление в технических системах.
Для выполнения лабораторных, практических и научно-исследовательских работ к настоящему времени участники сети имеют современное оборудование, предназначенное для успешной подготовки специалистов по всем указанным выше инженерным направлениям и специальностям. При построении сетевого материально-технического и программного учебно-лабораторного комплекса участники сети ориентировались на лучшие мировые образцы мехатронной техники и программного обеспечения, а также на создание собственных программных средств, позволяющих эффективно использовать имеющиеся установки и оборудование в составе сети в режиме дистанционного доступа.
При реализации указанного сетевого комплекса участниками проекта сети «Синергия» были предложены следующие основные принципы его построения:
- Каждый участник сети создавал собственный локальный специализированный предметно ориентированный учебно-лабораторный комплекс, базирующийся на их научно-технической специализации и потенциале, на составе соответствующих специалистов и обслуживающего персонала, а также на материально-технических и финансовых возможностях университетов.
- Созданные локальные технические комплексы с использованием сетевого оборудования и выделенных VPN каналов сети Интернет объединялись в единый сетевой технический и программный учебно-лабораторный комплекс, позволяющий получить удаленный доступ к локальному оборудованию всех университетов-участников проекта «Синергия».
В результате созданный сетевой технический и программный учебно-лабораторный комплекс оказался удобным для использования в каждом университете-участнике сети для проведения не только лабораторных и практических занятий, но и достаточно емких НИР, как в очной аудиторно-контактной форме — в части использования собственного локального оборудования, так и в заочной дистанционной форме — в части использования (по сети Интернет) локального оборудования, установленного в других университетах-участниках проекта «Синергия».
Внедрение этого комплекса в учебный процесс всех университетов-участников проекта «Синергия» позволило не только повысить качество учебного процесса за счет существенного расширения состава и возможностей используемого современного лабораторного оборудования, дистанционно доступного для всех, но и существенно сократить финансовые расходы университетов на приобретение и эксплуатацию новых дорогостоящих лабораторных установок. Важно, что в процессе приобретения нового программно-совместимого оборудования участниками сети были найдены новые инновационные формы сотрудничества с предприятиями-изготовителями робототехнических и мехатронных систем, а также систем промышленной автоматизации и управления, что позволило приобретать оборудование на льготных условиях, с частичным покрытием затрат, а, в ряде случаев, получить оборудование даже на безвозмездной основе.
В настоящее время созданный комплекс включает в себя пять локальных (базовых) узлов, оснащенных следующим учебно-лабораторным оборудованием.
Особенности программных средств и технология организации взаимного дистанционного доступа через интернет — сеть к лабораторному оборудованию
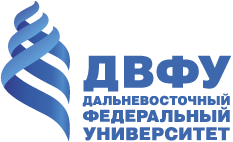
Обобщенная схема технологии организации дистанционного доступа через интернет — сеть к оборудованию участников проекта «Синергия» представлена на рисунке 1.
Для реализации возможности дистанционной работы с любым мехатронным оборудованием различных моделей по сети были использованы специализированные программные и аппаратные средства, позволяющие обеспечить удаленный доступ по технологии VPN. На основе этой технологии под руководством В.Е. Пряничникова в процессе проведения совместных исследований с Дальневосточным федеральным университетом в Институте прикладной математики РАН было создано программное обеспечение, в котором были предусмотрены средства для решения проблем синхронизации, временных задержек, разграничения прав доступа и построения mesh-сетей с подвижными ретрансляторами, недостаточно проработанные в системах типа ROS. Это программное обеспечение позволило реализовать промежуточный уровень «middleware» между аппаратной частью и прикладным уровнем, обеспечивая объединение несколько мехатронных устройств с возможностью удаленного доступа к ним и обеспечивая (при необходимости) динамическое изменение конфигурации (автоконфигурацию) компонентов системы без остановки дополнительных устройств.
Созданное программное обеспечение обладает свойствами кроссплатформенности (поддержка процессоров x86\ARM и операционных систем Windows\Linux\Android OS) для использования на различных бортовых вычислительных устройствах, имеет малый объем и обеспечивает возможность расширения списка драйверов для работы с новыми датчиками и приводами. При его создании был использован интерпретатор языка Python, обеспечивающий работу системы в реальном масштабе времени, и Тьюринг-полные протоколы для управления роботами вместо специализированных протоколов или графических интерфейсов типа GUI MS Robotic Studio и др.
Возможности языка Python позволили реализовать функцию перепрограммирования системы непосредственно во время ее функционирования, что обеспечивает возможность использования супервизорного управления, когда вместо управляющих команд на приводы робота подаются минипрограммы их управления. Это исключает влияние сетевых задержек при формировании управления роботами, часто приводящих к возникновению ошибок или даже аварийных ситуаций.
Реализация сетевых образовательных технологий практического обучения бакалавров, магистрантов и аспирантов с использованием современного мехатронного оборудования
Совместное дистанционное использование дорогостоящего мехатронного оборудования позволило университетам-компаньонам направлять появляющиеся средства на непрерывное расширение объединенного парка оборудования участников сети, непрерывно увеличивая функциональные возможности сетевых лабораторий.
В процессе выполнения лабораторных работ студентами изучается не только работа технических устройств во всех режимах их эксплуатации, включая аварийные, но также осуществляется многовариантное проектирование с учетом реальных условий эксплуатации лабораторного оборудования, изучается влияние дрейфа и изменения параметров элементов на функционирование устройств, анализируются последствия ошибочных действий без вывода из строя дорогостоящей техники компаньонов, приобретаются навыки и знания технологий наладки и ремонта оборудования и т.п.
Ниже рассмотрены примеры проведения лабораторных работ на установках нескольких университетов-участников сети, допускающих дистанционный доступ.
Выполнение лабораторных работ в Балтийском государственном техническом университете.
1) «Исследование линейного привода с разомкнутой и замкнутой по скорости системами управления». Целью лабораторной работы является знакомство с линейным электромеханическим приводом и исследование его характеристик с разомкнутой и замкнутой системами управления, построенными с помощью микроконтроллера.
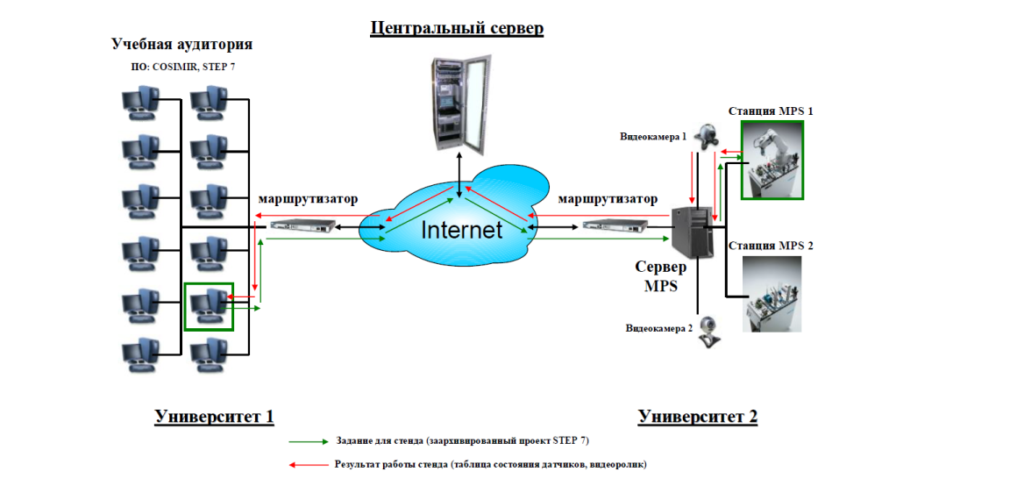
Лабораторная установка включает исследуемый линейный электромеханический привод, а также набор блоков питания и управления (рисунок 2). Линейный привод состоит из двигателя постоянного тока с инкрементным энкодером и шарико-винтовым механизмом. Положение каретки шарико-винтового механизма фиксируется с точность 0,05мм измерительным устройством или инкрементным энкодером.
Указанная установка позволяет исследовать приводы циклического принципа работы с различными режимами нагружения (в том числе с попутной нагрузкой), определять точность позиционирования в зависимости от циклограммы движения, скорости и действующей нагрузки. На указанной установке могут быть проведены более пяти двухчасовых лабораторных работ.
2) «Исследование электромеханического привода при гармоническом нагружении». Целью этой лабораторной работы (стенд для ее проведения показан на рисунке 3 является изучение методов стабилизации приводов при гармоническом изменении нагрузки, которая часто наблюдается во многих управляемых динамических системах.

3) «Исследование точности позиционирования электромеханического привода при цикловом движении». Целью этой лабораторной работы (стенд для ее проведения показан на рисунке 4) является изучение влияния характера изменения скорости вращения вала привода на точность его позиционирования при использовании различных систем управления.

Проведение лабораторных исследований и работ в Омском государственном техническом университете.
Аналогичные установки с интернет доступом имеются и в Омском государственном техническом университете. На рисунке 5 показан лабораторный стенд с роботом фирмы «Мицубиши» для проведения лабораторных работ по управлению схватом в форме кисти руки человека.

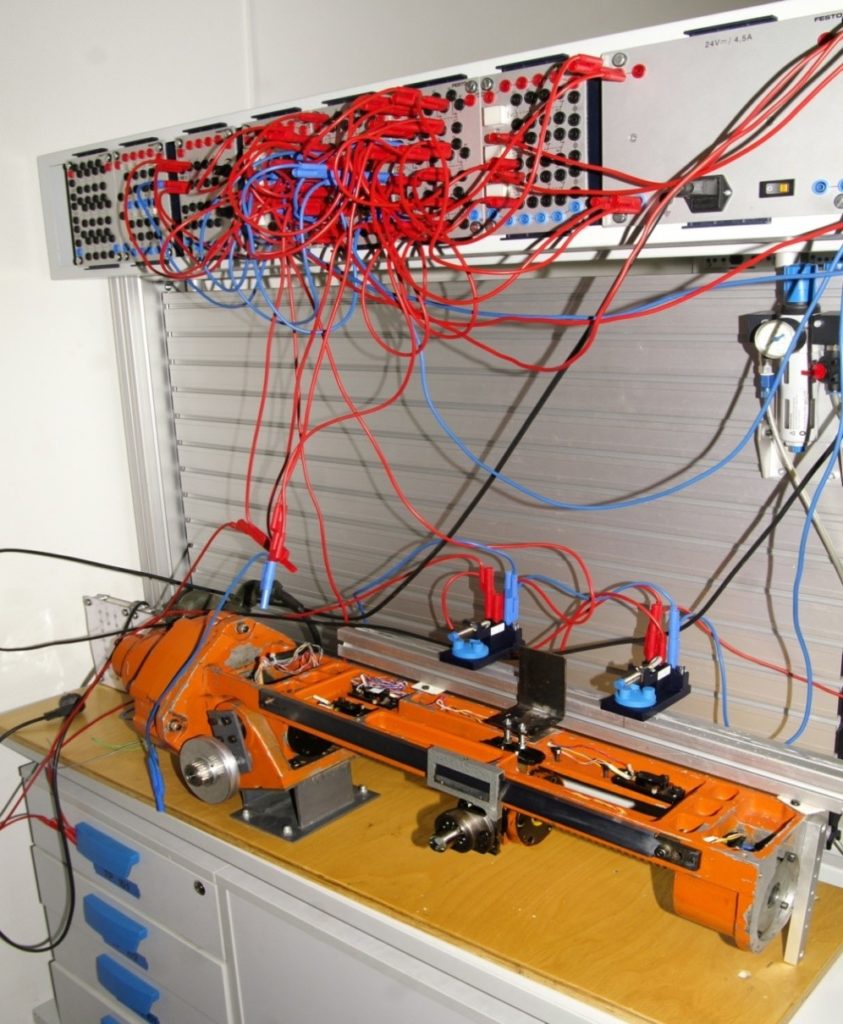
Впервые апробация созданного новейшего программного обеспечения была проведена при групповом управлении отечественными мобильными колесными и гусеничными роботами серии АМУР (рисунок 6) на территории Дальневосточного федерального университета. В состав каждого мобильного робота входит персональный бортовой компьютер, включаемый в локальную вычислительную сеть; система управления движением с усилителем сигналов управления и цифровыми дискретными входами/выходами; система измерения расстояний до обнаруживаемых предметов, построенная на основе ультразвуковых датчиков и микроконтроллера; видеокамера для визуального контроля движений роботов и видеосервер, включённый в локальную вычислительную сеть.

Бортовым компьютером робота является ноутбук ASUS Eee PC 1011CX, работающий под управлением Xubuntu Linux, получающий информацию от датчиков, установленных на роботе, и формирующий команды управления всеми его электронными и мехатронными подсистемами. Запуск управляющего программного обеспечения, установленного на ноутбуке, осуществляется с помощью средств управления процессами supervisord, которое включает два компонента: драйвер, предоставляющий интерфейс для программного взаимодействия с контроллером через локальную вычислительную сеть, и специализированное программное обеспечение для сервисных функции.
Система управления роботами построена на основе микроконтроллера «Робокон» версии С2b, который передает информацию от одометрических датчиков робота на бортовой компьютер и формирует сигналы управления всеми приводами в соответствии с командами, получаемыми от компьютера. Синтез сигналов управления осуществляется с помощью двухканального электронного ключа, работающего в режиме ШИМ, параметры которого задаёт микроконтроллер. Для измерения дистанций используются два ультразвуковых датчика типа SRF05, их сигналы обрабатываются микроконтроллером Arduino UNO, который, в свою очередь, подключён к бортовому компьютеру. Этот микроконтроллер имеет более восьми цифровых входов-выходов, что позволяет расширять состав сенсоров и элементов управления.
Бортовая видеосистема роботов использует цветные аналоговые видеокамеры, сигналы которых оцифровываются с помощью видеосервера модели Axis M7001, обеспечивая одновременное сжатие получаемого изображения по выбранному алгоритму с частотой кадровой развёртки 50Гц.
Описанные программно-аппаратные средства используются для дистанционного выполнения студентами различного и непрерывно увеличивающегося лабораторного практикума сразу по нескольким дисциплинам специальностей, связанных с робототехникой, автоматизацией производства и мехатроникой. Используемое оборудование и открытая архитектура построения созданной информационно – управляющей системы, обладающей элементами искусственного интеллекта, позволяет непрерывно модернизировать программную и аппаратную части роботов самим студентам, но особенно аспирантам, для расширения их функциональных возможностей и показателей качества. Особенно это ценно при осуществлении дистанционного интернет-доступа к роботам.
В условиях уже отмеченного дефицита дорогого современного оборудования это существенно расширяет круг дистанционных пользователей (студентов, магистрантов и аспирантов), выполняющих не только лабораторные работы и исследование, но и реальное проектирование в рамках конкретных научно-технических проектов по федеральным целевым программ, а также грантам РНФ и РФФИ.
В настоящее время важным направлением развития мобильных робототехнических систем является реализация их групповых действий в процессе выполнения сложных миссий и операций. Созданная универсальная архитектура компьютерной информационно — управляющей системы мобильных роботов «АМУР» и разработанное для нее программное обеспечение оказались очень удобными для группового управления. Это управление колесными, гусеничными и шагающими роботами, созданными на платформе робота «АМУР», с помощью сети при их перемещении различным строем (рисунок 7) выполняется студентами в нескольких лабораторных работах.
Целью реализуемого лабораторного практикума является получение теоретических знаний и практических навыков реализации сложных систем автоматического управления. При подготовке и выполнении лабораторных работ студенты изучают состав оборудования (см. рисунок 8) мобильных роботов, структуру их информационно-управляющей системы, особенности формирования и обмена данными между всеми роботами, перемещающимися различным строем.
Изучаемая студентами система группового управления строится на основе стратегии ведущий-ведомые. В группе назначается лидер. Только он имеет полную информацию о заданной траектории движения. Лидер сканирует окружающее пространство своими сенсорами, выявляя препятствия на пути следования группы, а остальные роботы формируют свои траектории движения на основе информации о текущем положении лидера (рисунок 9).
Студенты проверяют работоспособность всех основных узлов и блоков робота и анализируют преимущества используемого подхода при организации группового управления в условиях ограниченной пропускной способности всех каналов связи между всеми мобильными роботами группы, поскольку при групповом управлении пропускная способность является определяющей для определения заданной точности передвижения строем.


Особое внимание при выполнении лабораторного практикума уделяется изучению особенностей передачи широковещательных сообщений от робота-лидера к роботам-ведомым (это исключает многократную передачу данных от лидера каждому ведомому или между ведомыми) и оцениванию эффективности используемых систем управления по сравнению с известными. Затем студенты изучают и реализуют возможности используемой системы по смене лидера и по изменению строя в процессе движения группы.
После проведения лабораторного практикума (в том числе и дистанционно с помощью сети) в ходе выполнения уже курсовых проектов по дисциплине «Автоматизированные информационно-управляющие системы», получив индивидуальные задания, студенты последовательно разрабатывают: архитектуру распределенной информационно — управляющей системы, обеспечивающей взаимодействие с локальными информационно-управляющими системами отдельных мобильных роботов группы; создают необходимые коммуникационные компоненты, позволяющие передавать данные между всеми мобильными роботами; строят, а затем и реализуют алгоритмы управления мобильными роботами в зависимости от заданной миссии. Окончательной базовой задачей для выполняемого курсового проекта является демонстрация согласованного движения группы мобильных роботов по заданной траектории в заданном строю. Эта демонстрация осуществляется и по сети, если курсовой проект выполняется студентами из различных университетов.
Любой курсовой проект по групповому управлению МР может быть усложнен, если он выполняется несколькими студентами. В этом случае роботу-лидеру дополнительно ставится задача обхода неожиданно появившихся заранее неизвестных препятствий. Более детально эта задача препятствий рассмотрена ниже.
Известно, что расширение области применения мобильных роботов требует увеличения их автономности при перемещении в нестационарном (изменяющемся) рабочем пространстве с заранее неизвестными препятствиями. Основным источником информации о наличие препятствий вблизи мобильных роботов являются их бортовые дальномеры. Целью лабораторной работы и последующих курсовых проектов является получение студентами навыков создания информационно-управляющих систем мобильных роботов, содержащих элементы искусственного интеллекта и обеспечивающих их безопасное перемещение в заранее неизвестной обстановке (обход препятствий).
В лабораторной работе рассматриваются два подхода к решению указанной задачи. Первый — традиционный основан на использовании метода потенциальных полей. Для реализации этого подхода студенты создают и анализируют архитектуру информационно-управляющей системы, обеспечивающую возможность использования и настройки функций, описывающих потенциальные поля, а также исключающую появление эффектов попадания в локальный минимум потенциального поля. Второй подход заключается в формировании гладких траекторий движения мобильных роботов и их подстройке на основе данных, непрерывно поступающих от бортовых дальномеров. При реализации этого подхода студенты разрабатывают модуль формирования программных сигналов перемещения каждого мобильного робота, обеспечивающих их движение по траекториям, описываемым сплайнами Безье второго порядка. Движение мобильных роботов по этим траекториям происходит с заданной скоростью (возможно переменной).
Пример движения мобильного робота Robotino в среде с препятствиями показан на рисунке 10.

Перед выполнением работы студенты изучают теорию и оригинальные публикации, подготовленные коллективом кафедры «Автоматизация и управления» ДВФУ в процессе реализации нескольких научных проектов по грантам различного уровня.
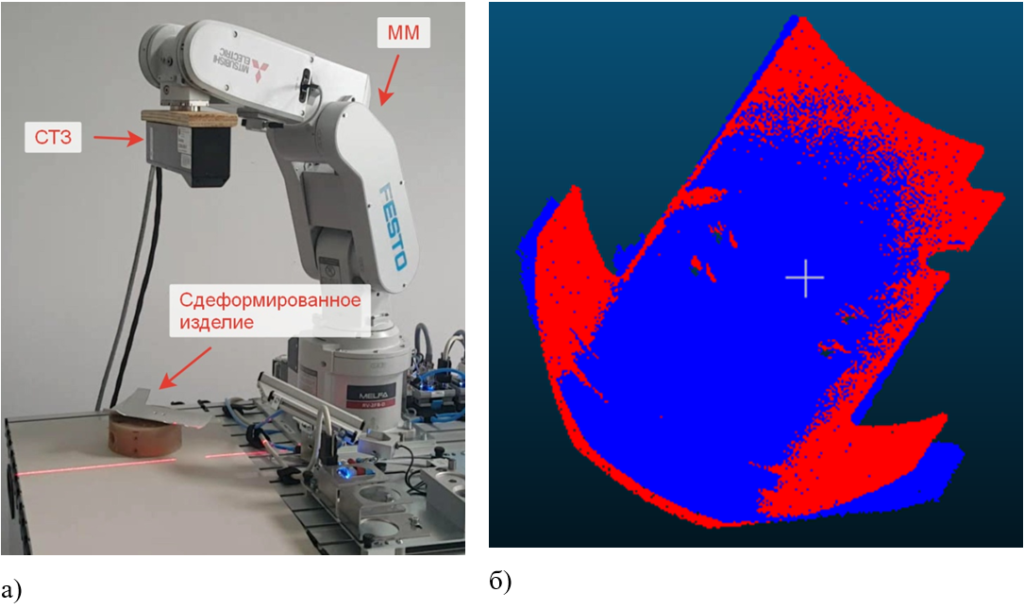
Аналогичная лабораторная работа выполняется студентами (возможно в дистанционном режиме), когда многозвенный манипулятор реализует сложную технологическую операцию с использованием систем технического зрения при наличии неизвестных деформаций в процессе закрепления заготовки перед механической обработкой. Эта лабораторная работа была подготовлена по материалам двух крупных проектов по постановлению правительства №218 и по Федеральной целевой программе с двумя индустриальными партнерами — промышленными предприятиями Приморского края (ПАО «Дальприбор» и ПАО ААК «ПРОГРЕСС»). В рамках этих двух проектов была создана новая технология точной обработки гибких изделий произвольной геометрической формы с помощью многозвенных манипуляторов, оснащаемых системами технического зрения.
Созданная технология предполагает простую и быструю фиксацию изделия в универсальной оснастке с возможной произвольной деформацией ее геометрической формы; сканирование закрепленного изделия с помощью системы технического зрения; совмещение эталонной CAD-модели изделия с его моделью, полученной после сканирования, для точного определения мест механической обработки; автоматическое построение траекторий движения рабочего инструмента многозвенного манипулятора.
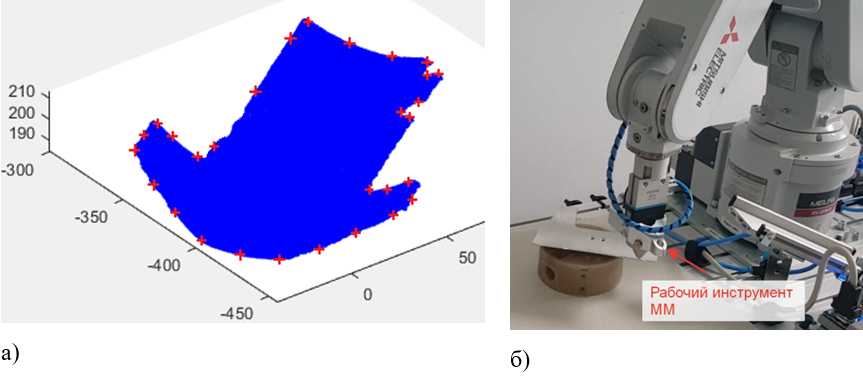
Целью этой лабораторной работы является освоение студентами созданной новой интеллектуальной роботизированной технологии точной и быстрой обработки сложных пространственных деталей. При проведении лабораторной работы студенты вначале произвольно деформируют и произвольно закрепляют выданную деталь. Затем осуществляют ее сканирование с помощью лазерного сканера Gocator 3280 A и получают компьютерную модель детали в виде облаков точек (см. рисунок 11). С помощью созданного программного обеспечения уплотняют облако, убирая возникшие просветы, и совмещают CAD — модель с полученной трехмерной моделью отсканированной произвольно деформированной детали.
После этого по специальному алгоритму студенты определяют недеформированные и деформированные участки детали и, используя созданный алгоритм, обеспечивают перенос точек траекторий обработки детали с CAD — модели на трехмерную модель деформированной детали. В заключение производится (и наблюдается студентами) точное перемещение манипулятором Mitsubishi RV-2FB-D рабочего инструмента вдоль поверхности детали, имитирующее ее обработку (см. рисунок 12).
Более детально все расчеты с поэтапным моделированием всех указанных выше процессов выполняются студентами при курсовом проектировании в рамках дисциплины «Роботы и их системы управления». При групповом выполнении проекта с демонстрацией полученных результатов в задании на проектирование наиболее способным студентам добавляется раздел, касающийся задания максимально возможной скорости перемещения рабочего инструмента в пределах заданной динамической точности управления.
При выполнении лабораторной работы студенты составляют математическую модель всей системы, выбирают программную траекторию движения рабочего инструмента многозвенного манипулятора относительно обрабатываемой детали и проводят математическое моделирование процесса обработки этой детали с целью определения участков траектории, на которых могут появляться непредсказуемые реверсы электроприводов. Деталь и программная траектория движения заранее задается такой, чтобы эти реверсы обязательно появлялись. Проведя специальный анализ, студенты определяют требуемое положение основания манипулятора относительно детали, при котором эти реверсы исключаются. Затем основание манипулятора перемещается в это заданное положение. После того, как студенты при моделировании убеждаются в правильности выбранного нового положения, проводятся натурные испытания при выполнении многозвенным манипулятором двух указанных движений на установке. При этом линейная степень подвижности манипулятора, имитирующая перемещение его основания относительно детали, обеспечивается транспортером.
В курсовых проектах студенты решают задачу выполнения рабочих операций с помощью манипуляторов, когда места обработки изделий заранее неизвестны, а формируются только с помощью систем технического зрения в процессе выполнения конкретных технологических операций. При этом у студентов полностью отсутствует возможность предварительного определения участков обработки, где могут происходить незапланированные реверсы. Поэтому студенты на основе изученной теории должны обязательно формировать дополнительный блок, обеспечивающий автоматическое смещение основания манипулятора в случае обнаружения и подхода к опасным участкам непрерывно формируемой траектории обработки изделия. После математического моделирования рассмотренных ситуаций, студенты также исследуют их с помощью натурного робототехнического с синтезированной системой управления.
Все рассмотренные и другие лабораторные установки подключены к сети. Это позволяет выполнять лабораторный практикум дистанционно.
Но проведением лабораторного практикума и выполнением практических частей курсовых проектов возможности сети не исчерпываются. Наиболее способные студенты непосредственно участвуют в грантах федеральных целевых программ, РНФ и РФФИ, реализуя новые системы, защищаемые патентами на изобретения и свидетельствами на программные продукты. Только это в конечном итоге способствует приобретению компетенций в области проектирования и внедрения на различных производствах интеллектуальных информационно-управляющих систем многозвенных манипуляторов с системами технического зрения.
Обобщенная методика проведения лабораторного практикума
Несмотря на большое разнообразие стендов и оборудования участников сети пока основной упор при дистанционном проведении лабораторных работ делается на обучающие установки отечественного производства и стенды типа MPS концерна Фесто, которые являются компонентами учебной мехатронной линии и наиболее подготовлены к сетевым демонстрациям.
При использовании установок концерна Фесто лабораторные работы проводятся по следующей технологии, разработанной участниками проекта:
- вначале студент получает задание на проектирование программы управления одним из учебных стендов;
- по полученному заданию разрабатывается программа для промышленного контроллера S — 300 в программной среде STEP-7;
- производится отладка программы на визуальном имитаторе стенда в программной среде «Cosimir»;
- после отладки программы она через Интернет в архивированном виде отправляется в университет, в котором имеется соответствующий учебный стенд;
- производится загрузка разработанной программы в контроллер учебного стенда;
- запускается стенд и одновременно осуществляется видеозапись процесса с помощью web- камеры через интернет в режиме on-line, обеспечивая визуальный контроль работы стенда и параллельно документируя состояние датчиков системы управления;
- после окончания работы стенда пакет, содержащий видеоролик и таблицу состояния датчиков, в on-line или off-line режиме возвращается студенту;
- при выполнении студентом задания в полном объёме он получает зачёт, если выявляются ошибки, то процесс выполнения работы повторяется снова до получения положительного результата.
Многолетний опыт эксплуатации созданного комплекса показал, что удалось:
- существенно расширить спектр лабораторных установок, доступных для университетов-участников проекта без необходимости приобретения каждым университетом дорогостоящего оборудования;
- внести в учебный процесс новую компоненту, связанную с развитием умений, навыков и компетенций управления по сети интернет удаленным оборудованием;
оздать инструментальную базу для развития учебно-методического комплекса и осуществления инновационных технологий, применимых для новых форм обучения.