









Сетевой научно-технический совет
Ключевым шагом при выстраивании сетевой формы организации взаимодействия между университетами-участниками сети стало формирование сетевого научно-технического совета – сообщества профессионалов в области промышленной автоматизации, мехатроники и робототехники, интеллектуальных систем управления и обработки информации. Фактически этот научно-технический совет стал постоянно действующей открытой дискуссионной площадкой для обсуждения научных проблем и подготовки совместных научных проектов. На совете уже сформулированы новые постановки задач, ведется координация выполнения совместных НИР и ОКР, проводятся открытые on-line предзащиты и защиты диссертационных работ в «присутствии» специалистов и экспертов, находящихся в других городах и в других странах. Подготовлено несколько совместных публикаций по определению основных направлений исследований и по уже полученным результатам.
В объединенном научно-техническом совете проекта «Синергия» на постоянной основе принимают участие ведущие специалисты в области мехатроники, автоматизации и управления:
- от Балтийского государственного технического университета: д.т.н., профессор Стажков С.М.; д.т.н., профессор Потапов А.М.; д.т.н., профессор Шароватов В.Т.; д.т.н., профессор Королев В.А.;
- от Омского государственного технического униврситета: д.т.н., профессор Хомченко В.Г;
- от МЭИ: д.т.н., доцент Бобряков А.В.; д.т.н., профессор Державин О.М., д.т.н., профессор Скибицкий Н.В., к.т.н., доцент Анисимов Д.Н.;
- от Севастопольского государственого университета: к.т.н., доцент Кабанов А.А.; д.т.н., профессор Крамарь В.А., к.т.н. Альчаков В.В.;
- от Дальневосточного федерального университета: д.т.н., профессор Филаретов В.Ф.; д.т.н., профессор Жирабок А.Н.; д.т.н., доцент Юхимец Д.А.,; к.т.н., доцент Зуев А.В.;
- от Карагандинского государственного технического университета: д.т.н., профессор Брейдо И.В.; д.т.н., профессор Фешин Б.Н.;
- от Новгородского государственного технического университета: д.т.н., профессор Абрамов А.М.;
- от Владимирского государственного технического университета: д.т.н., профессор Кобзев А.А.;
- от Санкт-Петербургского политехнического университета Петра Великого: д.т.н., профессор Шкодырев В.П., к.т.н., доцент Потехин В.В.;
- от Владимирского государственного университета: д.т.н., профессор Кобзев А.А.
- от Уральского федерального университета им. Б.Н.Ельцына: д.т.н., профессор Ребрин О.И.
- от Московского государственного технологического университета «Станкин»: д.т.н., профессор Подураев Ю.В.
На многих заседаниях совета принимают участие преподаватели и научные сотрудники кафедр университетов-участников проекта «Синергия».
Все перечисленное оказало заметное положительное влияние на качество выполненных в университетах-компаньонах диссертационных работ, а возможность обсуждения результатов в широком кругу специалистов позволило привлечь наиболее компетентных исследователей и получить неформальные, качественные отзывы на диссертационные работы, обеспечив информирование всего сетевого сообщества о последних научных и технических разработках и достижениях участников сети.
К уже выполненным и выполняемым научным проектам, на ход выполнения которых оказало влияние периодическое обсуждение в сети, можно отнести:
В рамках субсидии на государственную поддержку развития кооперации российских высших учебных заведений и организаций, реализующих комплексные проекты по созданию высокотехнологичного производства, утвержденных постановлением Правительства Российской Федерации от 9 апреля 2010 года N 218
- Проект по Договору № 02.G25.31.0025 «Создание высокотехнологичного производства полимерных композитных деталей вертолетов в условиях ОАО ААК «ПРОГРЕСС» шифр 2012-218-03-063.
- Проект по Договору № № 02.G25.31.0160 «Организация импортозамещающего производства прецизионных мехатронных устройств стабилизации, позиционирования и наведения бортовой аппаратуры космической и авиационной техники» шифр 2016-218-???????.
В рамках Федеральной целевой программы «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2007-2013 годы»
- Государственный контракт 07.514.11.4085 «Разработка новых принципов и методов построения комплексной информационно-телекоммуникационной системы для высокоточного управления движениями сложных мехатронных объектов».
- Государственный контракт 07.514.11.4062 «Разработка информационно-коммуникационной системы для управления роботизированным комплексом механической обработки сложных корпусных композитных изделий вертолетов и легких самолетов».
В рамках Федеральной целевой программы «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2014-2020 годы»
- Проект «Разработка новых интеллектуальных информационно-коммуникационных систем и технологий для высококачественного управления очувствленными промышленными роботами, предназначенными для автоматического выполнения сложных технологических операций в условиях неопределенности» (Соглашение №14.604.21.0054).
- Проект «Разработка информационно-управляющей системы для автономных подводных транспортных средств нового поколения с элементами искусственного интеллекта» (Соглашение №14.613.21.0018).
В рамках грантов Российского научного фонда:
- 14-19-00081 «Разработка новых методов синтеза интеллектуальных информационно-управляющих систем мобильных роботов различного назначения» (2014 г.);
- 16-19-00046 «Разработка математических методов синтеза схем и процедур обнаружения неисправностей и отказов систем отказоустойчивого управления робототехническими системам» (2016 г.).
В рамках. грантов Российского фонда фундаментальных исследований:
- № 07-08-00102_а «Комплексное развитие алгебраического и дифференциально-геометрического подходов для решения задач анализа и синтеза технических систем, описываемых нелинейными динамическими моделями» (2006 г.);
- № 08-07-99043-р-офи «Создание универсального программного моделирующего комплекса для визуального моделирования и исследования автоматизированных технологических процессов, построенных с использованием высококачественных манипуляционных и робототехнических систем и устройств» (2008 г.);
- № 09-08-00080-а «Разработка методов синтеза высокоточных систем управления сложными динамическими объектами с неизвестными и переменными параметрами (подводными роботами и манипуляторами), функционирующими в условиях ограничения мощности их исполнительных устройств» (2009 г.);
- № 10-07-00612-а «Создание новых методов построения специализированных систем обработки и анализа изображений и управляющих сигналов автономных и телеуправляемых мобильных роботов, их сенсорных и навигационных подсистем» (2010 г.);
- № 10-08-00133_а «Разработка методов анализа и синтеза нелинейных сингулярных динамических систем и систем с запаздыванием на основе алгебраического и дифференциально-геометрического подходов» (2010 г.);
- № 10-07-00395_а «Разработка методов распознавания окружающей обстановки, комплексной обработки информации и построения распределенной системы управления группой мобильных роботов на основе WiFi-технологии» (2010 г.);
- № 10-08-91220-СТ_а «Разработка методов диагностирования и отказоустойчивого управления нелинейными динамическими системами в приложении к необитаемым подводным аппаратам» (2010 г.);
- №11-08-98505-р_восток_а «Разработка методов синтеза высококачественных систем управления автономными и телеуправляемыми подводными аппаратами, оснащенными многозвенными манипуляторами» (2011 г.);
- №11-07-98502-р_восток_а «Разработка подходов к созданию универсальных информационных систем для моделирования движений мобильных (в том числе и подводных) роботов и для комплексной оперативной обработки информации, поступающей от их сенсоров» (2011 г.);
- №11-08-98505-р_восток_а «Разработка методов синтеза высококачественных систем управления автономными и телеуправляемыми подводными аппаратами, оснащенными многозвенными манипуляторами» (2011 г.);
- №13-08-01344 «Разработка систем телеуправления многозвенными манипуляторами, установленными на мобильных роботах» (2013 г.);
- № 13-07-00741 «Разработка новых инфокоммуникационных технологий для высококачественного управления сложными многосвязными нелинейными интеллектуальными динамическими (мехатронными) системами и объектами» (2013 г.);
- № 16-29-04195 офи_м «Разработка методов синтеза и алгоритмов работы универсальной интеллектуальной информационно-управляющей системы для решения задач группового управления и взаимодействия роботов различных видов и назначения в условиях неопределенности» (2016 г.);
- № 16-07-00718 «Разработка интеллектуальной информационно-управляющей системы для многозвенных манипуляторов c установленными системами технического зрения, обеспечивающих быстрое выполнение сложных технологических операций в автоматическом режиме в условиях неопределенности окружающей обстановки» (2016 г.);
- №16-07-00300 «Разработка методов синтеза адаптивных информационно-управляющих систем и технологий для высокоскоростного и высокоточного управления манипуляторами с избыточными степенями свободы в условиях неопределенности» (2016 г.);
- №14-48-01598 «Автоматизация профильных термохалинных измерений морской среды на основе использования управляемых ныряющих дрифтеров» (2014 г.);
- № 15-08-06859 «Композиционный синтез робастных и адаптивных систем на основе асимптотических методов» (2015 г.).
В рамках: международных грантов РФФИ
- №08-08-90018- Бел_a «Разработка методов синтеза и анализа многомерных робастных и адаптивных систем управления нестационарными техническими объектами с использованием сигнатуры корневого портрета» (2008 г.);
- №08-08-92101-ГФЕН_а «Исследование и применение алгебраического и геометрического подходов для аккомодации к дефектам в нелинейных системах» (2008 г.);
- №09-08-92001-ННС_а «Многоцелевой мобильный робот с двумя многозвенными манипуляторами, стереоскопическим зрением и автономной дистанционно-управляемой системой захвата объектов» (2009 г.);
- №11-08-91151-ГФЕН_а «Комплексное развитие алгебраического и дифференциально-геометрического подходов к задаче диагностирования и отказоустойчивого управления сложными техническими системами с гибридной структурой» (2011 г.);
- №15-58-45067 ИНД_а «Разработка новых методов синтеза информационно-управляющих систем подводных робототехнических комплексов, обеспечивающих выполнение различных подводных миссий в условиях неопределенности внешней среды» (2015 г.);
- №17-57-45055 ИНД_а «Разработка новых методов синтеза высоконадежных и высокоточных систем управления и планирования траекторий движения групп автономных подводных роботов в неизвестном окружении» (2017 г.).
В рамках международной программы с индийскими коллегами
- Международный проект (Россия, Индия) «Разработка методов синтеза интеллектуальных информационно-управляющих систем нового поколения для технических средств освоения шельфовой зоны» Соглашение № 13-06-0112-м_а (2013 г.).
В рамках федеральной целевой программы «Научные и научно-педагогические кадры инновационной России на 2009-2013 гг.»:
- Государственный контракт НК-44 «Разработка методов синтеза и теории проектирования интеллектуальных систем и устройств управления сложными механотронными объектами и микромашинами с непрерывно изменяющимися и трудно идентифицируемыми параметрами» (2009 г.);
- Государственный контракт П473 от 04 августа 2009. «Разработка методов синтеза и теории проектирования интеллектуальных систем и устройств управления сложными механотронными объектами и микромашинами с непрерывно изменяющимися и трудно идентифицируемыми параметрами» (2009 г.);
- Государственный контракт № 02.740.11.0166 от 25 июня 2009. Шифр проекта: 2009-1.1-405-037. «Разработка многофункционального необитаемого подводного аппарата»;
- Соглашение 14.А18.21.0283 от 27.07.2012 г. «Разработка интеллектуального автономного необитаемого транспортного средства, включающего поверхностный и подводный роботы, предназначенного для решения широкого круга задач освоения и исследования Мирового океана».
В рамках хоздоговорных работ:
- Х/д НИР «Разработка и идентификация математических моделей силовых приводов устройства АК 630М» (по договору № 1518, 2013 г.).
- Х/д НИР «Разработка математических моделей и алгоритмов управления системой наведения АБМ-М30мхх» (по договору № 61/15, 2015 г.).
В области подготовки специалистов высшей квалификации в рамках созданного межуниверситетского научно-технического совета регулярно по сети проводятся открытые предзащиты соискателей ученых степеней. Это позволяет участникам обсуждения более глубоко и детально познакомиться с результатами подготовленных диссертационных работ и готовить более аргументированные отзывы на представленные авторефераты. Обсуждение на таких предзащитах позволяет привлечь внимание ученых разных университетов к разработкам и интеллектуальному потенциалу каждого из коллективов, побуждая к плодотворному сотрудничеству в научной сфере в рамках указанного научного направления.
Всего с начала работы научно технического совета проекта «Синергия» в режиме on-line проведено одна предзащита докторской диссертации и шесть предзащит кандидатских диссертаций, которые впоследствии были успешно защищены.
1. Предзащита докторской диссертации Юхимца Дмитрия Александровича (доцента Дальневосточного федерального университета) на тему: «Методы формирования программных сигналов и высокоточного управления скоростным движением подводных аппаратов» состоялась в ноябре 2014 в Москве (ИПМ им. М.В.Келдыша). Эта предзащита транслировалась по сети интернет.
Диссертация успешно защищена в 2015 году (рисунок 1).
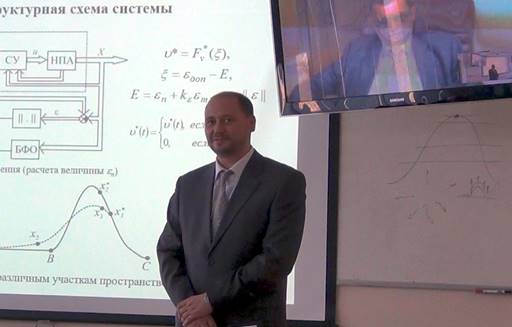
1 В этой диссертации описаны особенности создания и дано теоретическое обоснование новых подходов и методов синтеза систем управления автономными подводными аппаратами (роботами) с элементами искусственного интеллекта, которые за счет автоматической настройки параметров регуляторов и программных сигналов обеспечивают высокоточное движение любых подводных роботов по сложным пространственным траекториям с высокой скоростью в условиях неопределенности и переменности их параметров и параметров взаимодействия с окружающей вязкой средой при наличии значительных взаимовлияний между всеми степенями свободы НПА и ограничений мощности их усилительных и исполнительных устройств. Основные результаты этой диссертации изложены в монографии «Филаретов В. Ф., Юхимец Д. А. Особенности синтеза высокоточных систем управления скоростным движением и стабилизацией подводных аппаратов в пространстве. Владивосток: Дальнаука, 2016. 400 с. ISBN 978-5-8044-1577-9», которая удостоена звания лауреата на Всероссийском конкурсе научных монографий 2017 года.
На рисунке 2 показан один из созданных с его участием роботов, успешно выполняющих многие важные подводные задачи и миссии. В 2017 году монография, написанная по материалам диссертации Д.А.Юхимца, стала лауреатом Всероссийского конкурса научных книг в номинации технические науки.
2. Предзащита кандидатской диссертации (март, 2010) Зуева Александра Валерьевича (доцента Дальневосточного федерального университета) на тему «Разработка метода позиционно-силового управления многозвенными манипуляторами». Эта предзащита впервые для участников проекта «Синергия» транслировалась по сети интернет.
Диссертация успешно защищена в июне 2010 года (рисунок 3). Диссертация успешно защищена в 2015 году. В ней разработан и исследован новый метод позиционно-силового управления многозвенными манипуляторами, которое обеспечивает одновременное высокоточное управление и движением рабочего инструмента, и его силовым воздействием на внешние объекты и обрабатываемые поверхности.

Измерения точности отработки каждым электроприводом манипулятора заданного закона и режима движения проводились на универсальном электромеханическом стенде (рисунок 4) с цифровой (компьютерной) обработкой получаемых результатов, которые могут передаваться по сети.

3. Предварительная защита кандидатской диссертации Губанкова Антона Сергеевича ныне доцента Дальневосточного федерального университета на тему: «Адаптивное управление манипуляторами с максимальным быстродействием» по сети состоялась в ноябре 2014 года. Сама диссертация была успешно защищена в феврале 2015 г. (рисунок 5).
В этой диссертации разработаны и исследованы новые методы синтеза адаптивных систем управления многозвенными манипуляторами, способных обеспечить выполнение с их помощью различных технологических операций на предельно возможных скоростях без снижения заданной динамической точности движения и с учетом возможного входа исполнительных электроприводов манипуляторов в насыщение.

Реализация синтезированных систем управления была протестирована на созданной установке (рисунок 6) с микропроцессорным управлением, подключенным к сети. В результате экспериментов удалось показать, что при сохранении неизменной динамической точности отслеживания заданных законов управления электроприводами скорость движения рабочих инструментов манипуляторов по заданным пространственным траекториям, а, следовательно, и производительность работы манипулятора может быть повышена в 2,8 раза, только за счет адаптивной подстройки параметров регуляторов в пределах линейной зоны усилителей мощности.

4. Предварительная защита кандидатской диссертации Коноплина Александра Юрьевича (рисунк 7) ныне старшего преподавателя Дальневосточного федерального университета на тему: «Система автоматической стабилизации подводного аппарата в режиме зависания при работающем многозвенном манипуляторе» состоялась в январе, а защита в мае 2015 года.

В этой диссертации выполнены разработка и исследование новых методов синтеза высокоточных систем автоматического управления подводными роботами и их стабилизации в режиме зависания в заданной точке пространства при работающих подводных манипуляторах, а также методов автоматического управления режимами движения рабочих органов этих манипуляторов для более точного и быстрого выполнения различных подводных технологических операций.
5. Предзащита кандидатской диссертации (февраль, 2015) Чернусь Павел Павлович бывшего аспиранта Балтийского государственного технического университета на тему «Разработка динамических математических моделей силовых оболочковых бесштоковых пневмоцилиндров толкающего типа с учетом динамики сжатого газа », обсуждаемая по сети «Синергия», показана на рисунке 8. Она успешно защищена им в марте 2015 года.

Экспериментальная установка, использованная в диссертационной работе Чернусь П.П., показана на рисунке 9.

6. Предзащита кандидатской диссертации Потанина Юрия Сергеевича (выпускника Владимирского государственного университета) на тему «Разработка мехатронной системы на базе механизма с параллельной кинематикой с целью объединения функций коммутации и автоюстировки излучения оптических систем» состоялась в феврале 2016 года в Балтийском государственном техническом университете (см. рисунок 10).

В этой диссертации предложено синергетическое объединение функций коммутации и автоюстировки излучения в едином устройстве – оптическом коммутаторе, построенном на базе механизма с параллельной кинематикой. Введена визуальная главная обратная связь в мехатронной системе автоюстировки излучения установок с набором излучателей, построенная на скоростной видеосистеме и предложен алгоритм автоюстировки излучения, основанный на законах геометрической оптики, позволяющий оптическому коммутатору реализовать компенсацию угловых разъюстировок излучателей оптических систем.
7. Открытая предзащита кандидатской диссертации Бормотова Артема Валерьевича на тему «Модульная электрическая машина и мехатронная система на ее основе» состоялась в Балтийском государственном университете в сентябре 2016 года (см. рисунке 11).

8. Предзащита кандидатской диссертации Мурсалимова Эдуарда Шамильевича (ныне старший преподаватель Дальневосточного федерального университета) по сети состоялась в ноябре 2016 года, а защита — в феврале 2017 года (см. рисунок 12). Тема его диссертации «Разработка метода синтеза универсальной информационно-управляющей системы для робототехнических устройств».

Целью его диссертационной работы являлась разработка методов построения указанной системы для робототехнических устройств различного вида и назначения, в состав которых может входить различный набор аппаратных средств, компонентов и сенсоров, необходимых для выполнения этими устройствами различных задач и миссий в условиях частичной или полной неопределенности окружающей среды и параметров объектов работ. Создаваемые информационно-управляющие системы, имея простое расширение их функциональных свойств и возможностей, обеспечивают высококачественное управления движением различных роботов, включая вновь разрабатываемые устройства нового поколения с элементами искусственного интеллекта.
Обобщенная структурная схема созданной информационно управляющей системы, построенной на основе архитектуры JAUS, показана на рисунке 13. Эта система активно используется студентами для проведения нескольких лабораторных работ.
9. Предзащита диссертационной работы Проценко Александра Анатольевич на соискание ученой степени кандидата технических наук «Разработка методов синтеза систем аккомодации к дефектам в робототехнических системах» состоялась в ноябре 2017.
Целью этой диссертации является разработка новых методов синтеза систем аккомодации к часто возникающим типовым дефектам в робототехнических объектах, описываемых сложными нелинейными дифференциальными уравнениями с переменными параметрами. Эти системы за счет специально формируемых дополнительных управляющих воздействий обеспечивают свойства инвариантности роботов к указанным дефектам и тем самым гарантирую их неизменную работоспособность и эффективность в процессе автономной эксплуатации.
Экспериментальные проверки теоретических разработок этой диссертации выполнены с помощью автономного подводного робота.
Всего с начала работы НТС-Синергия в режиме on-line проведено более 10 предзащит докторских и кандидатских диссертаций, которые впоследствии были успешно защищены.
Важно отметить, что все стенды и установки, создаваемые для проведения экспериментов в диссертационных работа, впоследствии используются студентами при выполнении соответствующих лабораторных работ.