







Дальневосточный ФУ
Техническое оснащение базового узла Дальневосточного федерального университета.
Этот узел оснащен объединенными в единую локальную сеть роботами различных производителей.
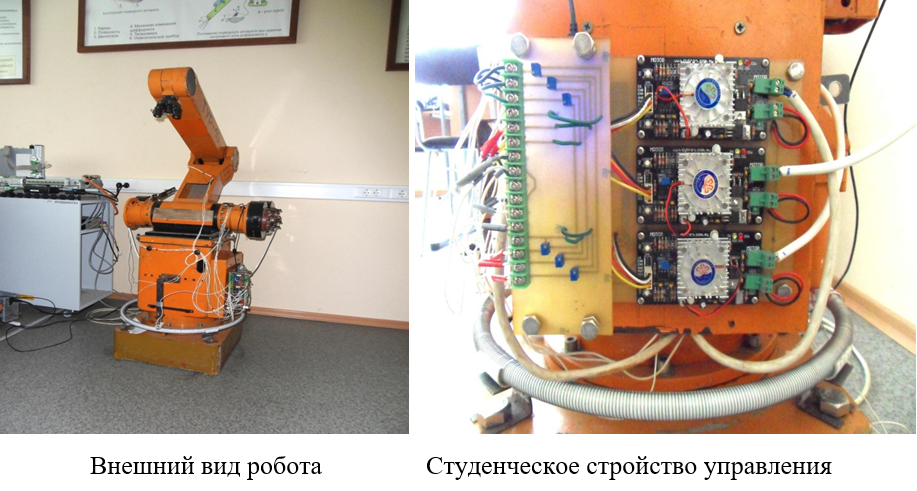
Базовый узел ДВФУ содержит три универсальных шестистепенных промышленных манипулятора. Один из них — KUKA (рисунок 1), который оснащен средствами технического зрения (видеокамерами и сканерами). Отечественный робот «ТУР – 10» (рисунок 2) предназначен для испытания систем управления различными степенями подвижности, которые студенты самостоятельно проектируют и изготавливают во время курсового проектирования и подготовки выпускных квалификационных работ.

Внешний вид робота Студенческое стройство управления
Промышленный робот Mitsubishi RV-2SDB входит в состав расширенного учебного комплекса «Мехатроника MPS 210» (рисунок 3).
Этот универсальный комплекс, позволяющий имитировать и легко перестраивать различные промышленные технологические процессы, дополнительно содержит:
- распределительную станцию;
- станцию проверки;
- станцию обработки;
- станцию переноса;
- буферную станцию;
- станцию роботизированной сборки;
- станцию пробивки;
- станцию сортировки.
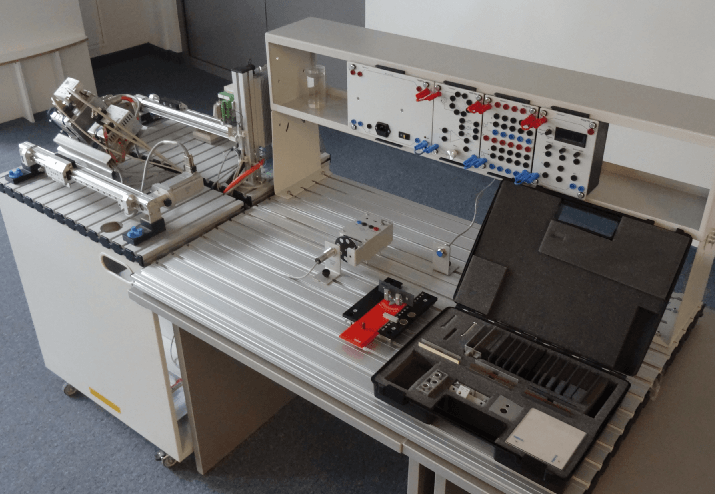
Кроме того, базовый узел в ДВФУ располагает несколькими учебными лабораторными стендами корпорации ФЕСТО для исследования типовых чувствительных и исполнительных (силовых) элементов промышленных и мобильных робототехнических устройств (рисунок 4):
- стенд с сервоприводом;
- стенд с шаговым двигателем;
- стенд с датчиками (чувствительными элементами) различных типов.

В целом университетом у концерна ФЕСТО закуплено оборудование и комплектующие на сумму около 25 млн. рублей.
Парк мобильных роботов узла ДВФУ состоит из колесного робота (рисунок 5) Robotino XT (подарок концерна ФЕСТО) с гибким бионическим манипулятором и пяти мобильных управляемых по сети роботов АМУР (рисунок 6), где они показаны во время работы в составе группы) различных конструкций (колесные, гусеничные и шагающие), которые спроектированы и изготовлены в международной лаборатории «Сенсорика» при Институте прикладной математики М.В.Келдыша.
Уникальная система управления положением схвата бионического манипулятора Robotino XT (рисунок 7) разработана и реализована магистрантами ДВФУ.
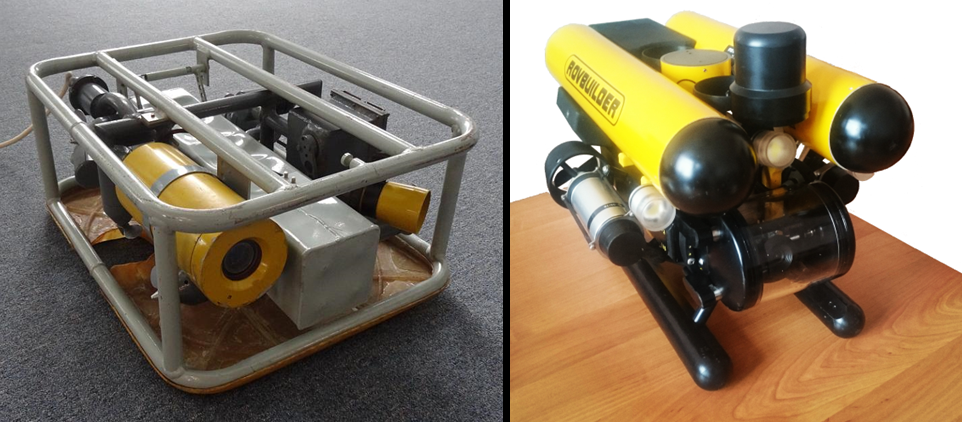
Лаборатория подводных роботов представлена тремя малыми телеуправляемыми аппаратами, изображенными на рисунок 31, и предназначенными для работы на глубинах до 6000 м, а также автономным подводным роботом собственного производства «МАРК» (рисунок 8), на борту которого установлены адаптивные и самонастраивающиеся системы управления и аккомодации к выявляемым неисправностям с элементами искусственного интеллекта.
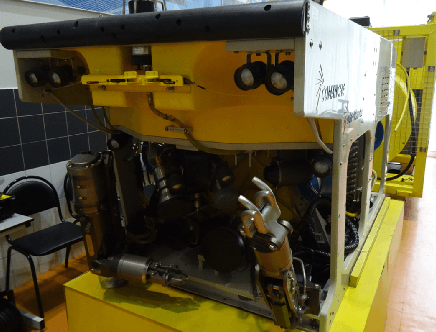
Экспедиционные работы выполняются с помощью многоцелевого телеуправляемого подводного робота КАМАНЧ-6000, оснащенного двумя многостепенными электрогидравлическими манипуляторами (рисунок 9).
Этот робот предназначен для выполнения сложных технологических операций на глубинах до 6000 м при наличии сопровождающего судна-носителя.
Для выполнения лабораторного практикума по курсу «Теория автоматического управления» в лаборатории ДВФУ установлены стенды, демонстрирующие особенности точного управления неустойчивыми положениями механических объектов (рисунок 10).