











НИУ МЭИ
Техническое оснащение базового узла национального исследовательского университета «МЭИ» включает несколько обучающих стендов
Стенд «Кубик Рубика»
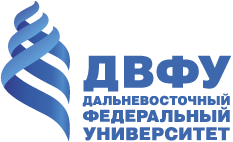
Он позволяет собрать кубик Рубика посредством управления двумя манипуляторами, расположенными перпендикулярно относительно друг друга. Внешний вид стенда приведен на рисунке 1. В состав этого стенда входят: 1 – пневмоостров; 2 – веб-камера; 3, 4 – линейно-поворотные двигатели; 5, 6 – параллельные захваты; 7 – линейный двигатель с панелью для установки кубика и 8 – клейменый модуль.
Два манипулятора стенда, оснащенные захватами, устанавливаются относительно друг друга под углом , что обеспечивает независимый доступ к вращаемым слоям кубика Рубика с возможностью удержания одного слоя кубика одним из манипуляторов, когда второй манипулятор осуществляет вращение другого слоя, не создавая помех для удерживающего конкретный слой манипулятора.
Стенд «Шашки»
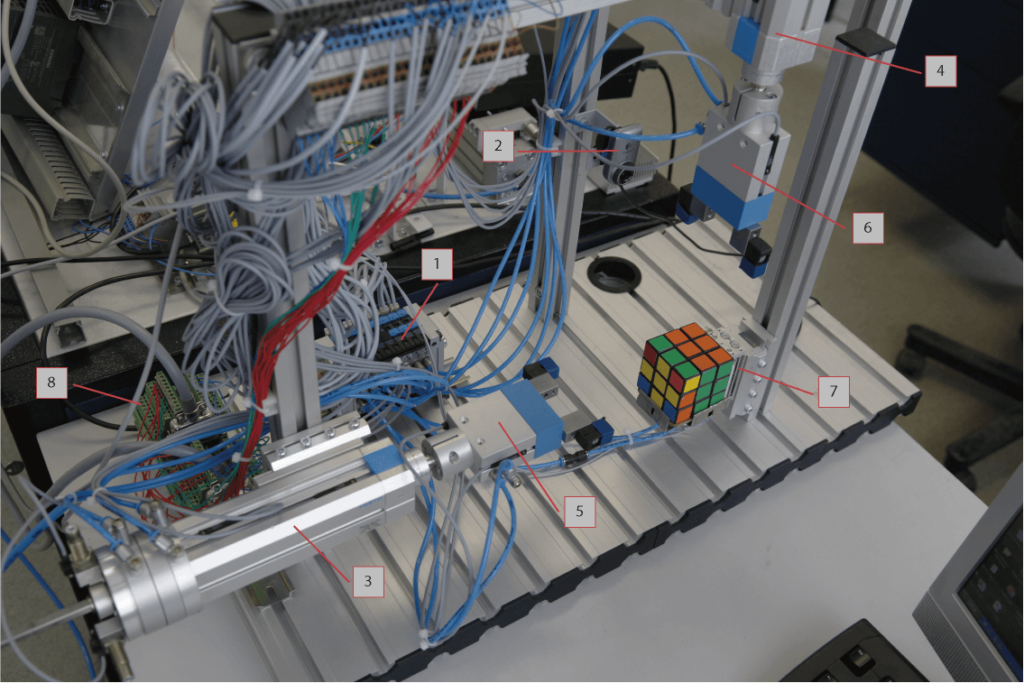
Этот стенд (рисунок 2) позволяет имитировать игру в шашки путем управления трехкоординатным пневматическим манипулятором, который имеет возможность перемещать шашки в горизонтальной плоскости в любое место в пределах игрового поля – шахматной доски.
Стенд «Лифт»
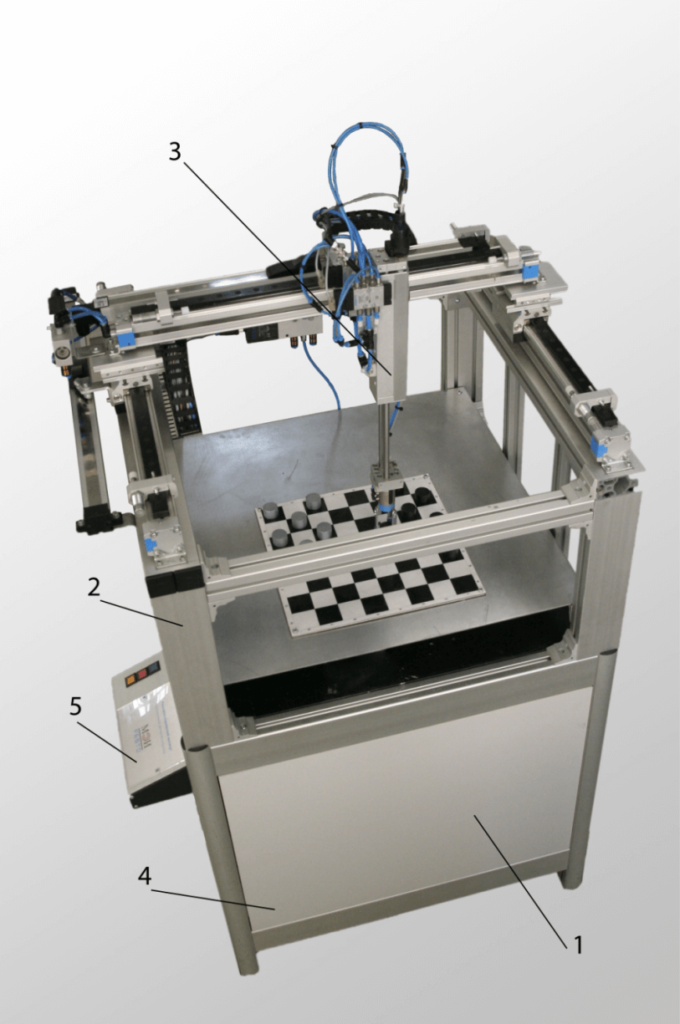
Стенд (рисунок 3) представляет собой действующую легко программируемую модель лифта для четырехэтажного здания. В его состав входят: 1 — дверной проем шахты, 2 – кнопка вызова кабины лифта на этаж, 3 — контроллер шагового двигателя, 4 – пульт ручного управления преобразователем частоты, 5 – кнопка внутреннего управления кабиной лифта, 6 – линейный привод двери.
Манипуляторы «Трипод»
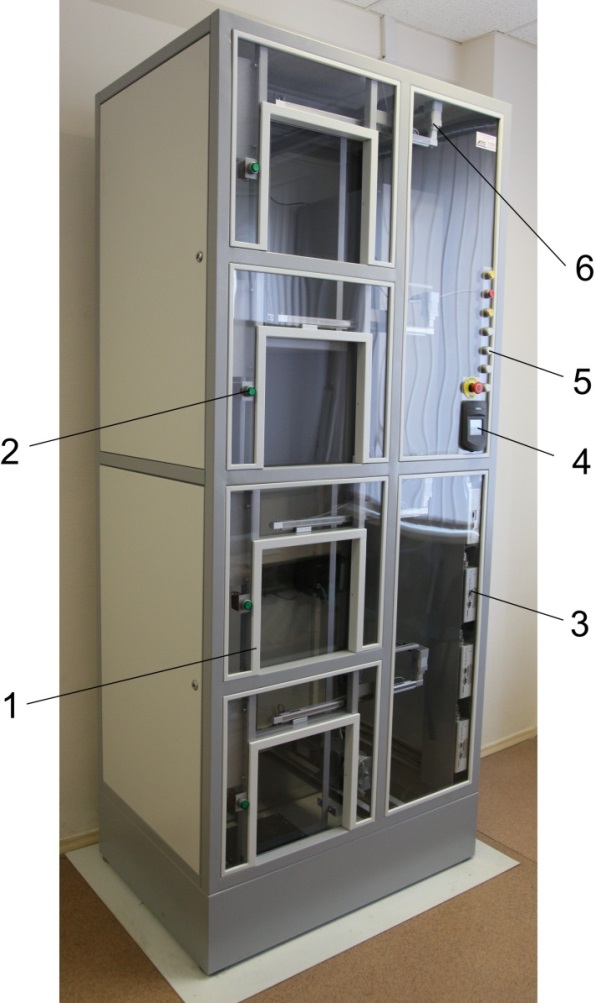
Каждый из двух стендов робототехнического центра МАИ построен на базе указанного манипулятора (рисунок 4) и включает шкаф управления со встроенными функциями робототехники. В шкаф входят:
- контроллер 3D-траекторий CMXR;
- контроллеры двигателей CMMPAS;
- контроллер безопасности;
- необходимые электротехнические компоненты.
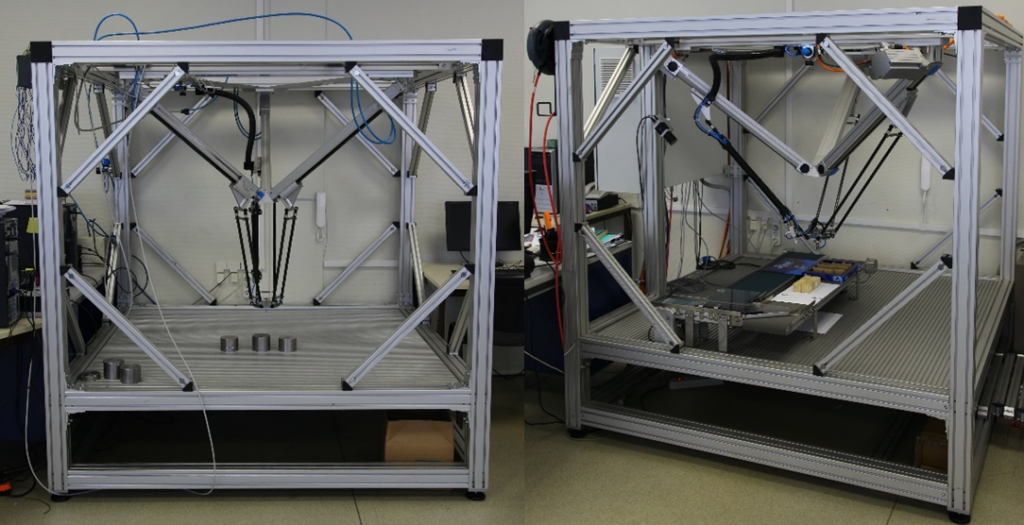
Триподы имеют два типа приводов — электромеханический и пневматический. Сам манипуляторы построен в виде пирамиды, ребрами которой являются три линейных привода. Каждый из них приводится в движение точно синхронными серво- или пневмоприводами. К кареткам линейных приводов крепятся углепластиковые тяги на сферических шарнирах. С противоположной стороны тяги соединяются с площадкой выходного звена. Взаимосвязано управляя всеми тремя приводами по определенным законам, можно осуществлять перемещения выходной площадки в пространстве с высокой скоростью и точностью.